設計概念
相關理論
(1)
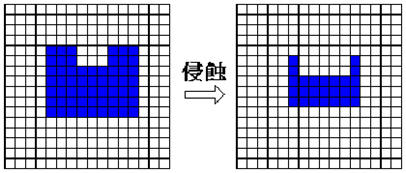
侵蝕
(Erosion)
侵蝕以AQB表示,A為輸入影像,B為結構元素 (structure element) 如圖一,當輸入像素及其周圍像素相對於結構元素為 1 的像素值皆為 255,則將輸入像素的值設為 255,使用 3x3 結構元素對物體作一次侵蝕運算
(2)
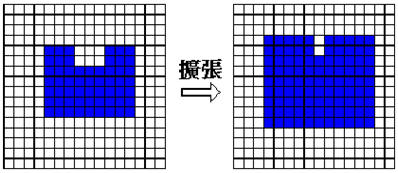
擴張
(Dilation)
擴張以AÅB表示,當輸入像素及其周圍像素相對於結構元素為 1 的像素值有一個以上為 255 時,則將輸入像素的值設為 255,使用 3x3 結構元素對影像作一次擴張運算
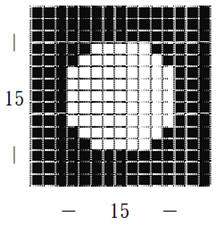
先計算出影像中之目標區域,並將此區域定為搜尋視窗 (Search Window),然後使用其定義之指尖特徵模版,於此區域內進行比對工作。此法係將區域比對法和特徵比對法相結合,用以找出指尖之特徵資訊,其定義之模版具有固定大小及樣式,如下圖所示:
‧Sobel邊緣偵測
在數位影像處理中,常利用邊緣偵測來找出期望的特徵點。影像中任一點(pixel)在階位與鄰近點突顯變化,則可視為邊緣(edge)。因為數位影像是離散的,因此可將原始影像
I
Sobel 運算是微分運算和低通運算的結合,以3x3 遮罩(mask),其定義如下:

其中hx
表x
方向微分,hy
表y
方向微分。取原始影像
I
Gx(x,y)= hx* I(x,y)
Gy(x,y)= hy* I(x,y)
則總梯度強度M(gradient magnitude)為

‧細線化
細線化之主要目的是為了找出物體之骨架,如此助於減少資料儲存之空間,另外細線化也可運用於印刷字或是手寫字等等之辨識,因為線條或紋理之寬度對於辨識之工作並無太大之貢獻,有時反而會造成辨識上之困擾,故需先進行細線化步驟,將粗細不等之線條及紋理細化成等寬度,以便下一步之辨識處理。

細線化處理程序
系統設計
實作方法及操作步驟分為以下五個部份進行:
(1)
透過程式與攝影機連線取得連續影像
(2)
將手的部分從影像中分離出來
(3)
擷取特徵資訊,辨識手勢動作
(4)
決定手勢動作所代表之滑鼠事件
(5)
傳送訊息控制系統滑鼠動作
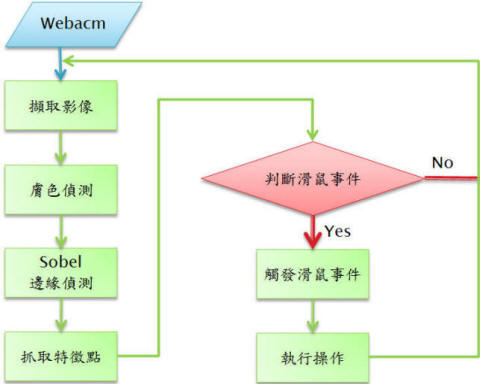
系統流程圖